Embedding
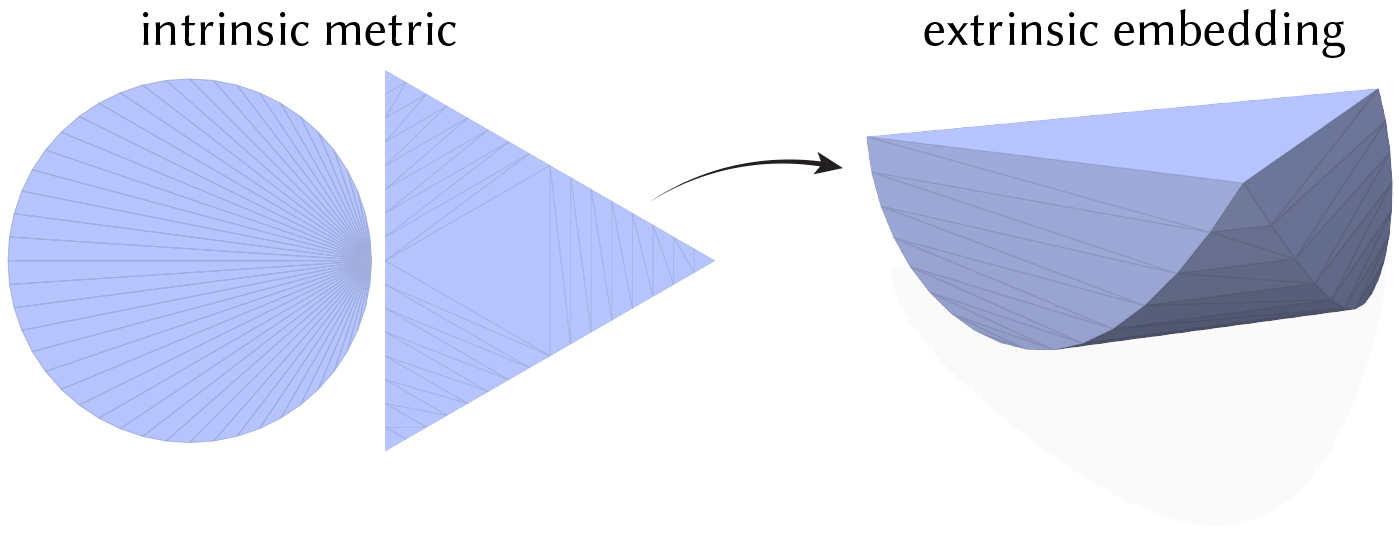
Isometric embedding algorithms attempt to find 3D vertex positions for a mesh (i.e., an extrinsic embedding) that match a given set of edge lengths (i.e., an intrinsic metric). Loosely speaking, these algorithms enable the 3D shape of an object to be recovered from its 2D UV coordinates—as long as the mesh was flattened without any stretching or distortion. In general, an exact isometric embedding may not exist, or may require that the triangulation be modified. For instance, the example above shows the shape obtained by gluing together a circular disk and a triangle of equal perimeter along their boundary. In this case, we can successfully find an embedding, but must flip many edges in order for the disk to bend as needed.
At present, Geometry Central implements only one embedding algorithm, for convex metrics. In this case a solution always exists, and can always be found via an efficient algorithm. A convex metric means that every vertex has non-negative Gaussian curvature. Alexandrov’s uniqueness theorem guarantees that any convex metric has an isometric embedding in three-dimensional space, which is unique up to rigid motions. Geometry Central uses a method based on Bobenko and Izmestiev’s algorithm to find such embeddings.
The input metric is purely intrinsic, and can hence be provided using any IntrinsicGeometryInterface. It can also be provided by specifying edge lengths or UV coordinates, as described below. In all cases, (i) the input mesh must be triangulated, (ii) edge lengths must be positive, (iii) edge lengths must satisfy the triangle inequality in each face, and (iv) vertex Gaussian curvature must be positive.
The output is an ordinary triangle mesh with vertex positions in three-dimensional space, encoded by a ManifoldSurfaceMesh and VertexPositionGeometry. Optionally (e.g., for debugging and visualization), one can also recover vertex positions at corners for intermediate stages of the embedding, and the correspondence between the input and embedded mesh, encoded by an intrinsic triangulation.
uv coordinates
When a metric is read from UV coordinates (e.g., in an OBJ file), lengths should be equal on opposite sides of each seam edge. These lengths will automatically be averaged if they are not exactly equal. Also be careful that coordinates written to disk are not truncated to a small number of digits, which can make flat vertices appear to have slight negative curvature.
The basic idea of Bobenko and Izmestiev’s algorithm is to create an intrinsic tetrahedral mesh, where every triangle of the given surface mesh is connected to a central “apex” by radial edges that are initially very long, creating long skinny tetrahedra. The radii of these edges are then optimized until the dihedral angle sum around all of them is equal to 2π, allowing the tetrahedra to be laid out in three-dimensional space without overlap. During optimization, edge flips are applied to ensure that edges of the boundary (i.e., the surface mesh) remain convex rather than concave.
Note that the Geometry Central implementation of this algorithm is based in part on the Java reference implementation by Stefan Sechelmann. However, our implementation makes some significant modifications not advocated by the original authors. Users interested in making comparisons (e.g., for academic research papers) are advised to consult the reference implementation.
convergence
Although the convex embedding algorithm is guaranteed to work in exact arithmetic, it can still fail to converge due to floating point error (e.g., when triangulations have near-degenerate elements, or are slightly non-convex due to truncation error in the input data). In this case, it can sometimes help to loosen the tolerances and/or increase the number of iterations in the embedder options. Additional diagnostic information is provided by setting EmbedConvexOptions::verbose = true.
Basic Usage
The easiest way to compute an embedding is through “one shot” wrapper functions that take some description of the intrinsic metric as input, and produce an embedded mesh as output.
Example
#include "geometrycentral/surface/meshio.h"
#include "geometrycentral/surface/embed_convex.h"
// Load a mesh with UVs
// Note: vertex positions will be ignored (e.g., can all be set to zero),
// since our goal is to solve for vertex positions that exhibit the UV lengths.
std::unique_ptr<SurfaceMesh> mesh;
std::unique_ptr<VertexPositionGeometry> geometry;
std::unique_ptr<CornerData<Vector2>> uvs;
tie(mesh, geometry, uvs) = readParameterizedManifoldSurfaceMesh(filename);
// Compute the embedding
EmbedConvexResult result = embedConvex( *mesh, *uvs );
if( result.success ) {
// do something with result.mesh and result.geometry
}
Additional options can be passed to the embedder by passing an optional EmbedConvexOptions struct to the embedding function:
EmbedConvexOptions options;
options.tolerance = 1e-2; // use a looser tolerance than default
EmbedConvexResult result = embedConvex( *mesh, *uvs, options );
EmbedConvexResult embedConvex(ManifoldSurfaceMesh& mesh, EdgeData<double>& edgeLengths, EmbedConvexOptions options = defaultEmbedConvexOptions);
Embed a metric described by a set of edge lengths. Options are passed as a RemeshOptions object. If embedding fails, the flag EmbedConvexResult::success will be set to false. Input mesh mesh and edge lengths edgeLengths are unchanged.
EmbedConvexResult embedConvex(ManifoldSurfaceMesh& mesh, CornerData<Vector2>& textureCoordinates, EmbedConvexOptions options = defaultEmbedConvexOptions);
Embed a metric described by a set of UV coordinates. Options are passed as a RemeshOptions object. If embedding fails, the flag EmbedConvexResult::success will be set to false. Note that since UVs are in general discontinuous, the two lengths across any seam edge must agree (and will be averaged if not). Note also that shape recovery from UVs will work only if the mesh was unfolded isometrically, i.e., without any stretching or distortion of edges. Input mesh mesh and UVs textureCoordinates are unchanged.
EmbedConvexResult embedConvex(ManifoldSurfaceMesh& mesh, IntrinsicGeometryInterface& intrinsicGeometry, EmbedConvexOptions options = defaultEmbedConvexOptions);
Embed a metric described by an IntrinsicGeometryInterface. Note that this could be a purely intrinsic description such as EdgeLengthGeometry, but also an extrinsic description such as VertexPositionGeometry (e.g., for debugging/sanity checking). Options are passed as a RemeshOptions object. If embedding fails, the flag EmbedConvexResult::success will be set to false. Input mesh mesh and metric IntrinsicGeometry are unchanged.
Advanced Usage
More options are available when performing an embedding via the ConvexEmbedder class. The basic pattern is:
ConvexEmbedder embedder( *mesh, *uvs, options );
if( embedder.init() ) { // try initializing the embedding
if( embedder.embed() ) { // try finding the embedding
embedder.refreshVertexCoordinates(); // compute final vertex coordinates
// now do something with members of embedder
}
}
The separate init() and embed() method help provide diagnostics—if initialization fails, the mesh failed to meet the preconditions of the algorithm (e.g., non-triangular faces); if embedding fails, the embedder likely ran into numerical difficulty (and perhaps looser tolerances or more iterations are required). Rather than embedding the whole surface all at once, you can also take one step at a time:
for( int i = 0; i < n; i++ ) {
embedder.stepEmbedding();
embedder.refreshVertexCoordinates();
// e.g., animate the partial results at each step
// using embedder->localLayout
}
final vertex coordinates
Note that the embedding is primarily represented by the radii stored in ConvexEmbedder::r. When using the class interface, neither vertex positions nor corner positions are computed automatically (since they are not needed by intermediate stages of the algorithm). One must therefore call ConvexEmbedder::refreshVertexCoordinates() before attempting to access ConvexEmbedder::embedding or ConvexEmbedder::localLayout.
Constructors
ConvexEmbedder::ConvexEmbedder(ManifoldSurfaceMesh& mesh, EdgeData<double>& edgeLengths, EmbedConvexOptions options = defaultEmbedConvexOptions);
Create an embedder from a metric described by a set of edge lengths. Options are passed as a RemeshOptions object. Input mesh mesh and edge lengths edgeLengths are unchanged.
ConvexEmbedder::ConvexEmbedder(ManifoldSurfaceMesh& mesh, CornerData<Vector2>& textureCoordinates, EmbedConvexOptions options = defaultEmbedConvexOptions);
Create an embedder from a metric described by a set of UV coordinates. Options are passed as a RemeshOptions object. Note that since UVs are in general discontinuous, the two lengths across any seam edge must agree (and will be averaged if not). Note also that shape recovery from UVs will work only if the mesh was unfolded isometrically, i.e., without any stretching or distortion of edges. Input mesh mesh and UVs textureCoordinates are unchanged.
ConvexEmbedder::ConvexEmbedder(ManifoldSurfaceMesh& mesh, IntrinsicGeometryInterface& intrinsicGeometry, EmbedConvexOptions options = defaultEmbedConvexOptions);
Create an embedder from a metric described by an IntrinsicGeometryInterface. Note that this could be a purely intrinsic description such as EdgeLengthGeometry, but also an extrinsic description such as VertexPositionGeometry (e.g., for debugging/sanity checking). Options are passed as a RemeshOptions object. Input mesh mesh and metric IntrinsicGeometry are unchanged.
Embedding functions
bool ConvexEmbedder::init();
Initialize the embedding, returning false if the given triangulation and metric do not meet the criteria for convex embedding (no boundary, triangulated, genus zero, and positive angle defect at all vertices).
bool ConvexEmbedder::embed();
Embed the given metric, returning true if embedding was successful. Note that this method “fails gracefully” in the sense that if the embedder can’t find an embedding that meets the specified tolerance, it will still construct vertex positions that are as close as possible, by averaging the most recent corner coordinates.
void ConvexEmbedder::stepEmbedding();
Take a single embedding step.
void ConvexEmbedder::refreshVertexCoordinates();
Compute extrinsic vertex positions at corners from the current intrinsic embedding, stored in localLayout. Also compute average coordinates at vertices, stored in embeding.
Embedder data
The current state of the embedding is encoded by edge lengths on a tetrahedral mesh connecting all surface triangles to a central “apex” vertex (ConvexEmbedder::apex). The edge lengths for this tetrahedral mesh are split up into lengths for each edge of a surface mesh (ConvexEmbedder::intrinsicTriangulation), as well as radii associated with each vertex of the surface mesh (ConvexEmbedder::r). At any moment, one can update corner and vertex coordinates by calling ConvexEmbedder::refreshVertexCoordinates(). The input metric is also stored in order to, e.g., visualize correspondence between the input metric and embedded triangulation.
Input metric
ManifoldSurfaceMesh ConvexEmbedder::originalMesh— the triangulation used to define the input metricIntrinsicGeometryInterface* ConvexEmbedder::originalMetric- the input metric, which determines edge lengths fororiginalMesh
Current metric
IntegerCoordinatesIntrinsicTriangulation* intrinsicTriangulation— the triangulation and edge lengths defining the current metric
Embedding
VertexData<double> r— length of radial edges connecting each vertex to the central apexCornerData<Vector3> localLayout— embedding of current metric (will be discontinuous for non-flat metrics). Update by callingConvexEmbedder::refreshVertexCoordinates().VertexData<Vector3> embedding— embedding of current metric (average of discontinuous values). Update by callingConvexEmbedder::refreshVertexCoordinates().Vector3 apex— location of central vertex, which makes tetrahedra with each triangle. Update by callingConvexEmbedder::refreshVertexCoordinates().
Helper Types
Options
Options are passed in to embedConvex() and constructors for ConvexEmbedder via a EmbedConvexOptions object.
| Field | Default value | Meaning |
|---|---|---|
double metricConvexityTolerance |
1e-5 |
how negative do we allow input Gaussian curvature to be? |
double edgeConvexityTolerance |
1e-3 |
how negative do we allow mean curvature to be? |
double initialStepSize |
1 |
initial step size for an embedding step |
int maxSteps |
20 |
maximum number of embedding steps |
int maxLineSearchSteps |
100 |
maximum number of line search steps |
double embeddingTolerance |
1e-3 |
maximum angle defect for any radial edge |
int maxNewtonIterations |
20 |
maximum number of steps for inner Newton solver |
int maxNewtonLineSearchSteps |
32 |
maximum number of line search steps for inner Newton solver |
double newtonTolerance |
1e-4 |
l2 norm of residual for convergence of Newton’s method |
bool verbose |
false |
whether to display diagnostic output |