Quantities
This page enumerates the surface geometry quantities available in geometry central.
Recall that these quantities are each associated with a geometry interface specifying what can be computed from the given input data. Instantiating a geometry from data, classes like VertexPositionGeometry extend these interfaces and give access to all of the quantities therein. Quantities should usually be accessed via the managed caches, as in the example below.
#include "geometrycentral/surface/vertex_position_geometry.h"
#include "geometrycentral/surface/meshio.h"
using namespace geometrycentral::surface;
// Load a mesh and geometry from file
std::unique_ptr<SurfaceMesh> mesh;
std::unique_ptr<VertexPositionGeometry> positionGeometry;
std::tie<mesh, positionGeometry> = readSurfaceMesh("spot.obj");
// For the sake of the example, use an interface type that offers
// only the quantities which we will actually use below.
IntrinsicGeometryInterface& geometry = *positionGeometry;
// populate the quantity
geometry.requireFaceAreas();
for(Face f : mesh->faces()) {
// Managed array holding quantity
double area = geometry.faceAreas[f];
// Immediate computation, computes directly from
// input data without touching caches.
// Generally discouraged but occasionally useful.
area = positionGeometry->faceArea(f);
}
Indices
These quantities are defined for the base BaseGeometryInterface, and will always be available. They are not actually geometric data, but it is convenient to cache the canonical arrays alongside geometric quantities, as they are often used in concert.
vertex indices
vertex indices
A dense 0-based enumeration of vertices. Equivalent to the result of SurfaceMesh::getVertexIndices().
- member:
VertexData<size_t> BaseGeometryInterface::vertexIndices - require:
void BaseGeometryInterface::requireVertexIndices()
halfedge indices
halfedge indices
A dense 0-based enumeration of halfedges. Equivalent to the result of SurfaceMesh::getHalfedgeIndices().
- member:
HalfedgeData<size_t> BaseGeometryInterface::halfedgeIndices - require:
void BaseGeometryInterface::requireHalfedgeIndices()
corner indices
corner indices
A dense 0-based enumeration of corners. Equivalent to the result of SurfaceMesh::getCornerIndices().
- member:
CornerData<size_t> BaseGeometryInterface::cornerIndices - require:
void BaseGeometryInterface::requireCornerIndices()
edge indices
edge indices
A dense 0-based enumeration of edges. Equivalent to the result of SurfaceMesh::getEdgeIndices().
- member:
EdgeData<size_t> BaseGeometryInterface::edgeIndices - require:
void BaseGeometryInterface::requireEdgeIndices()
face indices
face indices
A dense 0-based enumeration of faces. Equivalent to the result of SurfaceMesh::getFaceIndices().
- member:
FaceData<size_t> BaseGeometryInterface::faceIndices - require:
void BaseGeometryInterface::requireFaceIndices()
boundary loop indices
boundary loop indices
A dense 0-based enumeration of boundary loops. Equivalent to the result of SurfaceMesh::getBoundaryLoopIndices().
- member:
BoundaryLoopData<size_t> BaseGeometryInterface::boundaryLoopIndices - require:
void BaseGeometryInterface::requireBoundaryLoopIndices()
Lengths, areas, and angles
These quantities are defined for any IntrinsicGeometryInterface, which is the base class of all other geometry objects—they will always be available on any kind of geometry.
edge length
edge length
The length of an edge in the mesh, as a non-negative real number.
- member:
EdgeData<double> IntrinsicGeometryInterface::edgeLengths - require:
void IntrinsicGeometryInterface::requireEdgeLengths()
The inline immediate method can alternately be used to compute this value directly from input data for a single element:
- immediate:
double VertexPositionGeometry::edgeLength(Edge e)
face area
face area
The area of a face, as a non-negative real number.
May be computed from edge lengths via Heron’s formula, or from embedded vertex positions with a cross product.
Only valid on triangular meshes.
- member:
FaceData<double> IntrinsicGeometryInterface::faceAreas - require:
void IntrinsicGeometryInterface::requireFaceAreas()
The inline immediate method can alternately be used to compute this value directly from input data for a single element:
- immediate:
double EdgeLengthGeometry::faceArea(Face f) - immediate:
double VertexPositionGeometry::faceArea(Face f)
vertex dual area
vertex dual area
An area associated with each vertex, as a non-negative real number.
Only valid on triangular meshes.
Defined to be 1/3 the sum of all adjacent face areas. The sum of all vertex dual areas is equal to the usual surface area of the mesh.
- member:
VertexData<double> IntrinsicGeometryInterface::vertexDualAreas - require:
void IntrinsicGeometryInterface::requireVertexDualAreas()
The inline immediate method can be used to compute this value directly from input data for a single element:
- immediate:
double EdgeLengthGeometry::vertexDualArea(Vertex v) - immediate:
double VertexPositionGeometry::vertexDualArea(Vertex v)
corner angles
corner angles
The angle between incident edges at each corner of a mesh.
Only valid on triangular meshes.
- member:
CornerData<double> IntrinsicGeometryInterface::cornerAngles - require:
void IntrinsicGeometryInterface::requireCornerAngles()
The inline immediate method can alternately be used to compute this value directly from input data for a single element:
- immediate:
double EdgeLengthGeometry::cornerAngle(Corner c) - immediate:
double VertexPositionGeometry::cornerAngle(Corner c)
vertex angle sum
vertex angle sum
The sum of corner angles around a vertex.
Only valid on triangular meshes.
- member:
VertexData<double> IntrinsicGeometryInterface::vertexAngleSums - require:
void IntrinsicGeometryInterface::requireVertexAngleSums()
corner scaled angles
corner scaled angles
The angle between incident edges at each corner of a mesh, linearly rescaled such that the angles around every vertex sum to 2 \pi. At boundary vertices, no scaling will be performed.
Only valid on triangular meshes.
- member:
CornerData<double> IntrinsicGeometryInterface::cornerScaledAngles - require:
void IntrinsicGeometryInterface::requireCornerScaledAngles()
halfedge cotan weight
halfedge cotan weight
The “cotangent weight” of an interior halfedge, defined as \frac{1}{2} \cot(\theta), where \theta is the corner angle opposite the halfedge. Defined to be 0 for exterior halfedges.
Can be computed directly from edge lengths, or more efficiently in an embedded triangle via \cot(\theta) = \frac{u \cdot v}{||u \times v||}, where u and v are the edge vectors emanating from the opposite corner.
Only valid on triangular meshes.
- member:
HalfedgeData<double> IntrinsicGeometryInterface::halfedgeCotanWeights - require:
void IntrinsicGeometryInterface::requireHalfedgeCotanWeights()
The inline immediate method can alternately be used to compute this value directly from input data for a single element:
- immediate:
double EdgeLengthGeometry::halfedgeCotanWeight(Halfedge he) - immediate:
double VertexPositionGeometry::halfedgeCotanWeight(Halfedge he)
edge cotan weight
edge cotan weight
The “cotangent weight” of an edge, defined as the sum of halfedge cotan weights for incident interior halfedges.
Only valid on triangular meshes.
- member:
EdgeData<double> IntrinsicGeometryInterface::edgeCotanWeights - require:
void IntrinsicGeometryInterface::requireEdgeCotanWeights()
The inline immediate method can alternately be used to compute this value directly from input data for a single element:
- immediate:
double EdgeLengthGeometry::edgeCotanWeight(Edge e) - immediate:
double VertexPositionGeometry::edgeCotanWeight(Edge e)
Curvatures
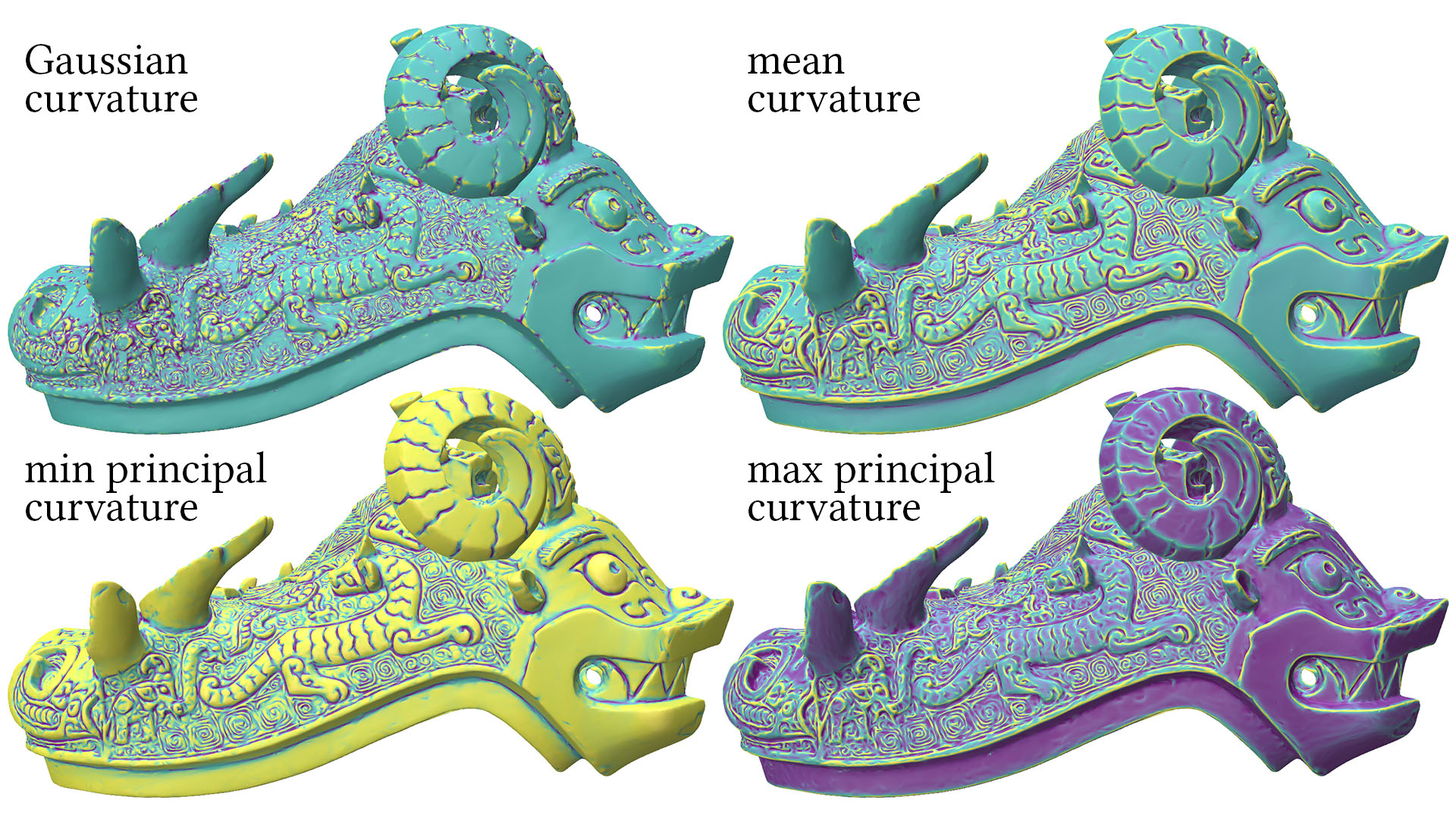
Different curvatures are available depending on whether geometry is intrinsic or extrinsic. In particular, Gaussian curvature is available for any IntrinsicGeometryInterface (such as EdgeLengthGeometry), which is the base class of all other geometry objects, whereas mean and principal curvatures are available only from an ExtrinsicGeometryInterface (such as VertexPositionGeometry). All curvatures are rigid motion invariant. Importantly, Gaussian and mean curvatures correspond to the integral of curvature over a local neighborhood, and are hence scale invariant—to get the pointwise curvatures you should divide by area (see details below). Principal curvatures are pointwise values. See also vertexPrincipalCurvatureDirections, which provides curvature directions (rather than curvature magnitudes). See this video for further background on discrete curvature.
vertex Gaussian curvature
vertex Gaussian curvature
The Gaussian curvature K at a vertex, defined via the angle defect K_v = 2 \pi - \sum \theta_i, where \sum \theta_i is the vertexAngleSum as above.
Should be interpreted as an integrated Gaussian curvature, giving the total curvature in the neighborhood of the vertex. On a closed surface, the Gauss-Bonnet theorem tells us that the sum of these Gaussian curvatures will be a topological constant given by \sum_v K_v = 2 \pi \chi, where \chi is the Euler characteristic of the surface. On surfaces with boundary, the geodesic curvature of the boundary factors in.
Only valid on triangular meshes.
- member:
VertexData<double> IntrinsicGeometryInterface::vertexGaussianCurvatures - require:
void IntrinsicGeometryInterface::requireVertexGaussianCurvatures()
The inline immediate method can be used to compute this value directly from input data for a single element:
- immediate:
double VertexPositionGeometry::vertexGaussianCurvature(Vertex v) - immediate:
double EdgeLengthGeometry::vertexGaussianCurvature(Vertex v)
vertex mean curvature
vertex mean curvature
The mean curvature H at a vertex i, defined via the Steiner approximation H_i = \frac{1}{4}\sum_{ij} \theta_{ij} \ell_{ij}, where \theta_{ij} is the edgeDihedralAngle and \ell_{ij} is the edgeLength as defined above (and the sum is taken over halfedges extending from i).
Should be interpreted as an integrated mean curvature (units: m), giving the total curvature in the neighborhood of the vertex. A corresponding pointwise mean curvature (units: 1/m) can be obtained by dividing by the vertexDualArea.
Only valid on triangular meshes.
- member:
VertexData<double> ExtrinsicGeometryInterface::vertexMeanCurvatures - require:
void ExtrinsicGeometryInterface::requireVertexMeanCurvatures()
The inline immediate method can be used to compute this value directly from input data for a single element:
- immediate:
double VertexPositionGeometry::vertexMeanCurvature(Vertex v)
vertex principal curvature
vertex principal curvatures
The principal curvatures \kappa_1,\kappa_2 at a vertex i, defined by the relationships K = \kappa_1\kappa_2 and H = (\kappa_1+\kappa_2)/2, where H and K are the pointwise mean and Gaussian curvatures (resp.). These values are signed, and \kappa_1 is always the smaller curvature in value, but not necessarily the smaller one in magnitude (e.g., \kappa_1 could be a very large negative value, and \kappa_2 could be a very small positive value).
These quantities can be interpreted as pointwise quantities (units: 1/m), approximating the maximum and minimum bending the neighborhood of the vertex.
Only valid on triangular meshes.
- member:
VertexData<double> ExtrinsicGeometryInterface::vertexMinPrincipalCurvatures -
require:
void ExtrinsicGeometryInterface::requireVertexMinPrincipalCurvatures() -
member:
VertexData<double> ExtrinsicGeometryInterface::vertexMaxPrincipalCurvatures - require:
void ExtrinsicGeometryInterface::requireVertexMaxPrincipalCurvatures()
The inline immediate methods can be used to compute this value directly from input data for a single element:
- immediate:
double VertexPositionGeometry::vertexMinPrincipalCurvature(Vertex v) - immediate:
double VertexPositionGeometry::vertexMaxPrincipalCurvature(Vertex v)
face Gaussian curvature
face Gaussian curvature
The Gaussian curvature K at a face, defined via the rescaled angle defect in the face K_f = -\pi + \sum \tilde{\theta}_i, where \tilde{\theta}_i are the rescaled corner angles (as in cornerScaledAngles) incident on the face.
Should be interpreted as an integrated Gaussian curvature, giving the total curvature inside of the face. A corresponding curvature-per-unit-area can be computed by dividing by the area of the face.
On a closed surface, the Gauss-Bonnet theorem tells us that the sum of these Gaussian curvatures will be a topological constant given by \sum_f K_f = 2 \pi \chi, where \chi is the Euler characteristic of the surface. On surfaces with boundary, the geodesic curvature of the boundary factors in.
Only valid on triangular meshes.
- member:
FaceData<double> IntrinsicGeometryInterface::faceGaussianCurvatures - require:
void IntrinsicGeometryInterface::requireFaceGaussianCurvatures()
Tangent vectors and transport
These quantities are defined for any IntrinsicGeometryInterface, which is the base class of all other geometry objects—they will always be available on any kind of geometry. Tangent vectors and transport are defined in terms of tangent spaces at faces and vertices, as defined below.
Recall that our Vector2 types obey the multiplication and division rules of complex arithmetic, and thus can be used to represent rotations. For instance, a 2D vector representing a rotation can be used to rotate another vector like:
Vector2 v = /* your vector */
Vector2 r = Vector2{std::cos(PI/4), std::sin(PI/4)}; // rotation by 45 degrees
Vector2 vRot = r * v;
Face tangent spaces
To represent vectors that sit in flat mesh faces, we define a 2D coordinate frame tangent to each face. By default, this frame is aligned such that face.halfedge() points along the x-axis (but subclasses might change this convention). All vectors in faces are then expressed via (x,y) Vector2D coordinates in this frame. Crucially, this basis is well-defined even if the geometry does not have vertex positions.
See face tangent basis to convert these vectors to world coordinates (if your mesh has vertex positions).
halfedge vectors in face
halfedge vectors in face
Vectors for each halfedge in the coordinate frame of the face in which they sit. See the description of face tangent spaces above for a definition.
Only valid on triangular meshes.
- member:
HalfedgeData<Vector2> IntrinsicGeometryInterface::halfedgeVectorsInFace - require:
void IntrinsicGeometryInterface::requireHalfedgeVectorsInFace()
transport vector across halfedge
transport vector across halfedge
Rotations which transport tangent vectors across a halfedge, rotating a vector from the tangent space of halfedge.face() to the tangent space halfedge.twin().face().
Always a unit vector, which can be multiplied by any other vector to compute the rotation. (recall our Vector2s multiply like complex numbers)
Only valid on triangular meshes. Not defined for halfedges (interior or exterior) incident on boundary edges, these boundary values are set to NaN so errors can be caught quickly.
- member:
HalfedgeData<Vector2> IntrinsicGeometryInterface::transportVectorsAcrossHalfedge - require:
void IntrinsicGeometryInterface::requireTransportVectorAcrossHalfedge()
Example usage:
geometry.requireTransportVectorsAcrossHalfedge();
Face f = /* ... */; // a face of interest
Vector2 myVec = /* ... */; // tangent vector in face f
for(Halfedge he : f.adjacentHalfedges()) {
Face neighborFace = he.twin().face();
Vector2 rot = geometry.transportVectorAcrossHalfedge[he];
Vector2 neighVec = rot * myVec; // now in the basis of neighborFace
}
Vertex tangent spaces
To represent vectors that sit at mesh faces, we consider a polar coordinate frame at each vertex. This frame is defined by measuring angles according to the rescaled corner angles as in cornerScaledAngles. By default, this frame is aligned such that vertex.halfedge() points along the \phi=0 x-axis (but subclasses might change this convention). Of course, rather than using polar coordinates we can equivalently work in the corresponding Cartesian frame—tangent vectors at vertices are then expressed via (x,y) Vector2D coordinates in this frame. Crucially, this basis does not require picking a vertex normal, and is well-defined even if the geometry does not have vertex positions.
See vertex tangent basis to convert these tangent vectors to world coordinates (if your mesh has vertex positions).

halfedge vectors in vertex
halfedge vectors in vertex
Vectors for each halfedge in the coordinate frame of the vertex from which the emanate (in halfedge.vertex()). See the description of vertex tangent spaces above for a definition.
Only valid on triangular meshes.
- member:
HalfedgeData<Vector2> IntrinsicGeometryInterface::halfedgeVectorsInVertex - require:
void IntrinsicGeometryInterface::requireHalfedgeVectorsInVertex()
transport vector along halfedge
transport vector along halfedge
Rotations which transport tangent vectors along a halfedge, rotating a vector from the tangent space of halfedge.vertex() to the tangent space halfedge.twin().vertex().
Always a unit vector, which can be multiplied by any other vector to compute the rotation. (recall our Vector2s multiply like complex numbers)
Only valid on triangular meshes.
- member:
HalfedgeData<Vector2> IntrinsicGeometryInterface::transportVectorsAlongHalfedge - require:
void IntrinsicGeometryInterface::requireTransportVectorsAlongHalfedge()
Example usage:
geometry.requireTransportVectorsAlongHalfedge();
Vertex v = /* ... */; // a vertex of interest
Vector2 myVec = /* ... */; // tangent vector in vertex v
for(Halfedge he : v.outgoingHalfedges()) {
Vertex neighborVertex = he.twin().vertex();
Vector2 rot = geometry.transportVectorAlongHalfedge[he];
Vector2 neighVec = rot * myVec; // now in the basis of neighborVertex
}
Operators
These quantities are defined for any IntrinsicGeometryInterface, which is the base class of all other geometry objects—they will always be available on any kind of geometry. A full explanation of these operators is beyond the scope of these docs; see these course notes for one introduction.
All operators are indexed over mesh elements according to the natural iteration order of the elements, or equivalently the indices from SurfaceMesh::getVertexIndices() (etc).
cotangent Laplacian
cotangent laplacian
The discrete Laplace operator, discretized via cotangent weights.
A |V| \times |V| real matrix. Always symmetric and positive semi-definite. If and only the underlying geometry is Delaunay, the matrix will furthermore have all negative off-diagonal entries, satisfy a maximum principle, and be an M-matrix.
This is the weak Laplace operator, if we use it to evaluate \mathsf{y} \leftarrow \mathsf{L} \mathsf{x}, \mathsf{x} should hold pointwise quantities at vertices, and the result \mathsf{y} will contain integrated values of the result in the neighborhood of each vertex. If used to solve a Poisson problem, a mass matrix (such as the lumped or Galerkin mass matrices below) are likely necessary on the right hand side.
Only valid on triangular meshes.
- member:
Eigen::SparseMatrix<double> IntrinsicGeometryInterface::cotanLaplacian - require:
void IntrinsicGeometryInterface::requireCotanLaplacian()
vertex lumped mass matrix
vertex lumped mass matrix
A mass matrix at vertices, where vertex area is 1/3 the incident face areas as in vertexDualAreas.
A |V| \times |V| real diagonal matrix. Generally less-accurate than the Galerkin mass matrix below, but can be easily inverted since it is a diagonal matrix.
Only valid on triangular meshes.
- member:
Eigen::SparseMatrix<double> IntrinsicGeometryInterface::vertexLumpedMassMatrix - require:
void IntrinsicGeometryInterface::requireVertexLumpedMassMatrix()
vertex Galerkin mass matrix
vertex Galerkin mass matrix
A mass matrix at vertices, supported at all neighbors of a vertex via integration of piecewise-linear elements.
A |V| \times |V| real matrix. Generally more accurate than the lumped mass matrix above, should be preferred unless the mass matrix needs to be inverted.
Only valid on triangular meshes.
- member:
Eigen::SparseMatrix<double> IntrinsicGeometryInterface::vertexGalerkinMassMatrix - require:
void IntrinsicGeometryInterface::requireVertexGalerkinMassMatrix()
vertex connection Laplacian
vertex connection Laplacian
A discrete connection Laplacian operator, which applies to vector fields defined in vertex tangent spaces. Essentially defined as the scalar cotangent Laplacian, augmented with rotations given by the rotations in transportVectorAlongHalfedge; see The Vector Heat Method, Sec 5.3 for more explanation and definition.
A |V| \times |V| complex matrix. Always Hermitian, but positive semi-definite if and only the underlying geometry is Delaunay. This is a weak Laplace operator, the application of which outputs integrated values in vertex neighborhood.
Given a complex vector \mathsf{x} of tangent vectors at vertices, apply the operator by multiplying \mathsf{L} * \mathsf{x}.
Only valid on triangular meshes.
- member:
Eigen::SparseMatrix<std::complex<double>> IntrinsicGeometryInterface::vertexConnectionLaplacian - require:
void IntrinsicGeometryInterface::requireVertexConnectionLaplacian()
DEC operators
DEC operators
These operators are the basic building blocks for discrete exterior calculus on surfaces.
Note: These quantities slightly deviate from the usual naming scheme for quantities. Rather than requireD0(), requireD1(), etc, there is a single requireDECOperators() function which manages all 8 of the members listed below.
The following members are constructed:
Eigen::SparseMatrix<double> IntrinsicGeometryInterface::hodge0A |V| \times |V| diagonal matrixEigen::SparseMatrix<double> IntrinsicGeometryInterface::hodge0InverseA |V| \times |V| diagonal matrixEigen::SparseMatrix<double> IntrinsicGeometryInterface::hodge1An |E| \times |E| diagonal matrixEigen::SparseMatrix<double> IntrinsicGeometryInterface::hodge1InverseAn |E| \times |E| diagonal matrixEigen::SparseMatrix<double> IntrinsicGeometryInterface::hodge2An |F| \times |F| diagonal matrixEigen::SparseMatrix<double> IntrinsicGeometryInterface::hodge2InverseAn |F| \times |F| diagonal matrixEigen::SparseMatrix<double> IntrinsicGeometryInterface::d0An |E| \times |V| matrix with \{-1, 0, 1\} entriesEigen::SparseMatrix<double> IntrinsicGeometryInterface::d1An |F| \times |E| matrix with \{-1, 0, 1\} entries
Only valid on triangular meshes.
- require:
void IntrinsicGeometryInterface::requireDECOperators()
While the vertex-based cotan Laplacian above is standard in geometry processing, one can also construct a discrete Laplacian using different basis functions. The following matrices are the result of using Crouzeix-Raviart basis functions, which are Lagrange elements based at edge midpoints: Each function is piecewise linear, has a value at 1 at its associated edge midpoint, and is 0 at all other adjacent edge midpoints.
In graphics and geometry processing, Crouzeix-Raviart elements have been used, for example, to discretize bending energies and discretize vector Dirichlet energy. Because there are typically more edges than vertices in a mesh, and there are only two faces in the support of each Crouzeix-Raviart basis function, Crouzeix-Raviart operators also typically have more DOFs than vertex-based operators.
Crouzeix-Raviart Laplacian
Crouzeix-Raviart Laplacian
The discrete Laplace operator, discretized via the piecewise linear Crouzeix-Raviart basis functions associated with edge midpoints.
A |E| \times |E| real matrix. Always symmetric and positive semi-definite. This is the weak Laplace operator, if we use it to evaluate \mathsf{y} \leftarrow \mathsf{L} \mathsf{x}, \mathsf{x} should hold pointwise quantities at edge midpoints, and the result \mathsf{y} will contain integrated values of the result in the neighborhood of each edge midpoint. If used to solve a Poisson problem, a mass matrix is likely necessary on the right hand side.
Only valid on triangular meshes.
- member:
Eigen::SparseMatrix<double> IntrinsicGeometryInterface::crouzeixRaviartLaplacian - require:
void IntrinsicGeometryInterface::requireCrouzeixRaviartLaplacian()
Crouzeix-Raviart mass matrix
Crouzeix-Raviart mass matrix
A mass matrix at edges, where the edge area is 1/3 the incident face areas.
A |E| \times |E| real diagonal matrix. Corresponds to the Galerkin mass matrix for Crouzeix-Raviart elements, which is already diagonal without lumping.
Only valid on triangular meshes.
- member:
Eigen::SparseMatrix<double> IntrinsicGeometryInterface::crouzeixRaviartMassMatrix - require:
void IntrinsicGeometryInterface::requireCrouzeixRaviartMassMatrix()
Crouzeix-Raviart connection Laplacian
Crouzeix-Raviart connection Laplacian
A discrete connection Laplacian operator, which applies to vector fields defined in edge tangent spaces
A |E| \times |E| complex matrix. Always Hermitian and positive semi-definite.
Given a complex vector \mathsf{x} of tangent vectors at edge midpoints, apply the operator by multiplying \mathsf{L} * \mathsf{x}. Like other mesh elements, the x-axis of the tangent space at edge e points in the direction of e.halfedge().
Only valid on triangular meshes.
- member:
Eigen::SparseMatrix<double> IntrinsicGeometryInterface::crouzeixRaviartConnectionLaplacian - require:
void IntrinsicGeometryInterface::requireCrouzeixRaviartConnectionLaplacian()
Polygon mesh operators
The following quantities are designed for general polygon meshes, and are defined for any EmbeddedGeometryInterface. On triangle meshes, they will reduce to the classical discrete exterior calculus & finite element operators.
The polygon operators are based on Bunge et al.’s Polygon Laplacian Made Simple, whose discretization is based on virtual refinement of the polygon mesh; the code is based on Astrid Bunge and Mario Botsch’s implementation of their paper. The method builds local operators whose matrices are assembled per-polygon, so they will work out-of-the-box on non-manifold meshes (but no guarantees are provided!)
All operators are indexed over mesh elements according to the natural iteration order of the elements, or equivalently the indices from SurfaceMesh::getVertexIndices() (etc).
polygon mesh Laplacian
polygon mesh Laplacian
The discrete Laplace operator acting on polygon meshes, using Bunge et al.’s virtual refinement method in Polygon Laplacian Made Simple.
A |V| \times |V| real matrix. Always symmetric and positive semi-definite. On triangle meshes, this polygon Laplacian becomes the standard cotan Laplacian.
This is the weak Laplace operator.
Only valid on an EmbeddedGeometryInterface.
- member:
Eigen::SparseMatrix<double> EmbeddedGeometryInterface::simplePolygonLaplacian - require:
void EmbeddedGeometryInterface::requireSimplePolygonLaplacian()
polygon mesh vertex lumped mass matrix
polygon mesh vertex lumped mass matrix
A |V| \times |V| real diagonal matrix, using Bunge et al.’s virtual refinement method in Polygon Laplacian Made Simple. Obtained by setting each diagonal entry to the row sum in the Galerkin mass matrix. Bunge et al. note that the lumped mass matrix gives better results than the unlumped Galerkin mass matrix for most applications.
Only valid on an EmbeddedGeometryInterface.
- member:
Eigen::SparseMatrix<double> EmbeddedGeometryInterface::simplePolygonVertexLumpedMassMatrix - require:
void EmbeddedGeometryInterface::requireSimplePolygonVertexLumpedMassMatrix()
polygon mesh vertex Galerkin mass matrix
polygon mesh vertex Galerkin mass matrix
A |V| \times |V| real matrix, using Bunge et al.’s virtual refinement method in Polygon Laplacian Made Simple.
Only valid on an EmbeddedGeometryInterface.
- member:
Eigen::SparseMatrix<double> EmbeddedGeometryInterface::simplePolygonVertexGalerkinMassMatrix - require:
void EmbeddedGeometryInterface::requireSimplePolygonVertexGalerkinMassMatrix()
polygon mesh vertex connection Laplacian
polygon mesh vertex connection Laplacian
A discrete connection Laplacian operator, which applies to vector fields defined in vertex tangent spaces; based on the Laplacian from Bunge et al.’s Polygon Laplacian Made Simple.
Always symmetric and positive-definite.
A |V| \times |V| complex matrix.
Given a complex vector \mathsf{x} of tangent vectors at vertices, apply the operator by multiplying \mathsf{L} * \mathsf{x}.
Only valid on an EmbeddedGeometryInterface.
- member:
Eigen::SparseMatrix<std::complex<double>> EmbeddedGeometryInterface::simplePolygonVertexConnectionLaplacian - require:
void EmbeddedGeometryInterface::requireSimplePolygonVertexConnectionLaplacian()
Extrinsic angles
These quantities depend on extrinsic angles, but are still rotation-invariant, and independent of a particular embeddeding. They are defined for ExtrinsicGeometryInterface and classes that extend it, including the EmbeddedGeometryInterface one usually constructs from vertex positions. Currently there is no realization that constructs an ExtrinsicGeometryInterface from input data which is not also an EmbeddedGeometryInterface, but such a class could be implemented in the future.
edge dihedral angle
edge dihedral angle
The dihedral angle at an edge, in radians. Defined to be the signed angle between the incident triangle normals: 0 if the edge is flat, positive at a convex edge, and negative at a nonconvex edge.
Only valid on triangular meshes.
- member:
EdgeData<double> ExtrinsicGeometryInterface::edgeDihedralAngles - require:
void ExtrinsicGeometryInterface::requireEdgeDihedralAngles()
The inline immediate method can be used to compute this value directly from input data for a single element:
- immediate:
double VertexPositionGeometry::edgeDihedralAngle(Edge e)
vertex principal curvature direction
vertex principal curvature direction
A 2-symmetric tangent vector field at vertices. The direction corresponds to the first principal direction, and the magnitude is proportional to the squared difference of the 1st and 2nd principal curvatures (\kappa_1 - \kappa_2)^2 (so for instance, if a surface is flat and \kappa_1 \approx \kappa_2, the magnitude of the field will be near 0).
A formal description appears in section 6.1.2 of Globally Optimal Direction Fields
Only valid on triangular meshes.
- member:
VertexData<Vector2> ExtrinsicGeometryInterface::vertexPrincipalCurvatureDirections - require:
void ExtrinsicGeometryInterface::requireVertexPrincipalCurvatureDirections()
Embedded positions and normals
These quantities depend explicitly on an embedding in 3D space (better known as vertex positions). They are defined for EmbeddedGeometryInterface (which is usually instantiated as a VertexPositionGeometry). Don’t forget, EmbeddedGeometryInterface extends the IntrinsicGeometryInterface and ExtrinsicGeometryInterface, so all of the quantities above are also accessible.
vertex position
vertex position
Vertex positions in 3D.
- member:
VertexData<Vector3> EmbeddedGeometryInterface::vertexPositions - require:
void EmbeddedGeometryInterface::requireVertexPositions()
face normal
face normal
A normal vector for each face.
If the face is not triangular (more than three edges), returns the normalized vector area, computed via the shoelace formula.
- member:
FaceData<Vector3> EmbeddedGeometryInterface::faceNormals - require:
void EmbeddedGeometryInterface::requireFaceNormals()
The inline immediate method can alternately be used to compute this value directly from input data for a single element:
- immediate:
Vector3 VertexPositionGeometry::faceNormal(Face f)
vertex normal
vertex normal
A normal vector for each vertex. Defined as the corner-angle weighted average of incident face normals.
- member:
VertexData<Vector3> EmbeddedGeometryInterface::faceNormals - require:
void EmbeddedGeometryInterface::requireFaceNormals()
vertex dual mean curvature normal
vertex dual mean curvature normal
Conceptually, the mean curvature normal at any location on a surface is a vector which points in the normal direction, and has magnitude equal to the mean curvature at that location. In practice, we discretize this using the fact that applying the Laplacian to the position function yields the mean curvature normals.
Should be interpreted as an integrated mean curvature normal (units: m), giving the integral of the mean curvature curvature in the neighborhood of the vertex. A corresponding pointwise mean curvature (units: 1/m) can be obtained by dividing by the vertexDualArea.
Only valid on triangular meshes.
- member:
VertexData<double> EmbeddedGeometryInterface::vertexDualMeanCurvatureNormals - require:
void EmbeddedGeometryInterface::requireVertexDualMeanCurvatureNormals()
The inline immediate method can be used to compute this value directly from input data for a single element:
- immediate:
Vector3 VertexPositionGeometry::vertexDualMeanCurvatureNormal(Vertex v)
Fun fact: these vertex dual mean curvature normals are also the derivative of the mesh’s surface area with respect to vertex positions.
face tangent basis
face tangent basis
A pair of x-axis and y-axis 3D basis vectors in world space, corresponding to the intrinsic tangent space for the face. Always orthogonal to the face normal.
Example:
SurfaceMesh& mesh = /* ... */
VertexPositionGeometry& geometry = /* ... */;
FaceData<Vector2> myTangentVectorField;
geometry.requireFaceTangentBasis();
for(Face f : mesh.faces()) {
Vector2 field = myTangentVectorField[f];
Vector3 basisX = geometry.faceTangentBasis[f][0];
Vector3 basisY = geometry.faceTangentBasis[f][1];
Vector3 fieldInWorldCoords = basisX * field.x + basisY * field.y;
}
- member:
FaceData<std::array<Vector3,2>> EmbeddedGeometryInterface::faceTangentBasis - require:
void EmbeddedGeometryInterface::requireFaceTangentBasis()
vertex tangent basis
vertex tangent basis
A pair of x-axis and y-axis 3D basis vectors in world space, corresponding to the intrinsic tangent space for the vertex. Always orthogonal to the vertex normal.
Example:
SurfaceMesh& mesh = /* ... */
VertexPositionGeometry& geometry = /* ... */;
VertexData<Vector2> myTangentVectorField;
geometry.requireFaceTangentBasis();
for(Vertex v : mesh.vertices()) {
Vector2 field = myTangentVectorField[v];
Vector3 basisX = geometry.vertexTangentBasis[v][0];
Vector3 basisY = geometry.vertexTangentBasis[v][1];
Vector3 fieldInWorldCoords = basisX * field.x + basisY * field.y;
}
- member:
VertexData<std::array<Vector3,2>> EmbeddedGeometryInterface::vertexTangentBasis - require:
void EmbeddedGeometryInterface::requireVertexTangentBasis()